近日,我院李長江老師在自動控制領域頂級期刊IEEE Transaction on Cybernetics(影響因子11.8)上發表了常文“Relative States-Based Consensus for Sampled-Data Second-Order Multiagent Systems With Time-Varying Topology and Delays”。南方科技大學劉國平院士為論文共同作者。
多智能體系統一緻性控制是自動控制領域的重要研究方向,具有多方面的挑戰性。針對基于相對測量的一緻性控制的拓撲切換與時變時滞問題,作者提出了一種基于多項式參數化的一緻性控制方法,從理論上給出了系統狀态一緻的條件,并通過實驗驗證方法的有效性。主要創新點包括:提了一種新的參數化多項式的一緻性控制器設計方法;考慮的網絡為具有随機切換的一般非對稱網絡并考慮了網絡時滞;提出了一種基于塊半範數的一緻性分析方法,解決了一大類多智能體系統的狀态同步問題。
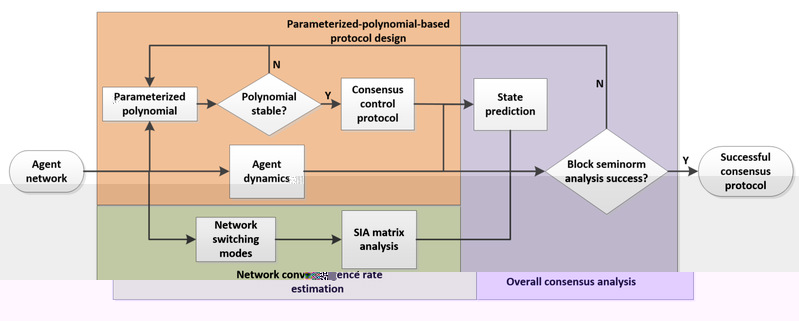
圖1 面向相對測量的動态網絡一緻性控制算法
據悉,李長江老師分别在自動領域頂級期刊《IEEE Transactions on Systems, Man and Cybernetics: Systems》(2023, https://doi.org/10.1109/TSMC.2023.3342010, 影響因子8.7)和《IEEE Transaction on Cybernetics》(2021,https://doi.org/10.1109/TCYB.2021.3079717)上發表了兩篇系列論文。研究工作得到了國家自然科學基金和江蘇省自然科學基金的支持。
論文鍊接: https://doi.org/10.1109/TCYB.2022.3232507
